Declarative DAG Reference¶
The actual schema definition can be found in the airflow_declarative/schema.py module. Some examples of complete DAGs are also available in the tests/dags/good directory.
This document contains a verbose description of the declarative DAG schema.
The anatomy of a declarative DAG:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 | # The comments below specify the names of the schema definition
# atoms which can be found in the `airflow_declarative/schema.py`
# module.
dags:
my_dag: # the DAG name
defaults:
sensors:
# `SENSOR`
args:
# `SENSOR_ARGS`
queue: my_sensors_queue
operators:
# `OPERATOR`
args:
# `OPERATOR_ARGS`
queue: my_operators_queue
args:
# `DAG_ARGS`
start_date: 2019-07-01
schedule_interval: 1d
default_args:
# `SENSOR_ARGS` | `OPERATOR_ARGS`
owner: my_name
sensors:
my_sensor:
# `SENSOR`
callback: myproject.mymodule:my_sensor_callback
callback_args:
my_kwarg: my_value
args:
# `SENSOR_ARGS`
poke_interval: 1m
operators:
my_operator:
# `OPERATOR`
callback: myproject.mymodule:my_operator_callback
callback_args:
my_kwarg: my_value
args:
# `OPERATOR_ARGS`
retries: 3
flow:
# `FLOW`
my_sensor:
- my_operator
do:
# `DO_TEMPLATE`
- operators:
my_crops_{{ item.name }}:
# `OPERATOR`
callback: myproject.myfruits:my_crops
callback_args:
fruit: '{{ item.fruit_props }}'
# `sensors` can be used there too!
flow:
# `FLOW`
my_operator:
- my_crops_{{ item.name }}
with_items:
# `WITH_ITEMS`
- name: pineapple
fruit_props:
shape: ellipsoid
color: brown
- name: watermelon
fruit_props:
shape: round
color: green
|
DAG_ARGS¶
DAG_ARGS atom defines the __init__ arguments of an Airflow DAG.
The actual meaning of these args can be found in the airflow.models.DAG
doc page.
OPERATOR / SENSOR¶
OPERATOR and SENSOR atoms look similarly, except that their args
schemas are different. They both define an Airflow operator (note that Sensors
in Airflow are considered to be Operators).
For an Operator, the args (the OPERATOR_ARGS atom) are
the __init__ args of the airflow.models.BaseOperator.
For a Sensor, the args (the SENSOR_ARGS atom) are
the __init__ args of
the airflow.sensors.base_sensor_operator.BaseSensorOperator.
The OPERATOR/SENSOR callable might be specified as a class.
Example for airflow.operators.bash_operator.BashOperator:
class: airflow.operators.bash_operator:BashOperator
args:
bash_command: 'echo "Hello World {{ ds }}"'
… or as a Python callable:
callback: myproject.mymodule:my_operator_callback
callback_args:
my_kwarg: my_value
args:
retries: 3
If callback value is a function, then it should look like this:
def my_operator_callback(context, my_kwarg):
print("Execution date", conext["ds"])
print("my_kwarg", my_kwarg)
The callback might also be a class:
class MyOperatorCallback:
def __init__(self, context, my_kwarg):
self.ds = context["ds"]
self.my_kwarg = my_kwarg
def __call__(self):
print("Execution date", self.ds)
print("my_kwarg", self.my_kwarg)
callback_args key is relevant only when callback is used (i.e. it cannot
be defined with class). The distinction between the args and
the callback_args is simple:
argsare the__init__args for theairflow.models.BaseOperator, which is used under the hood to wrap thecallback;callback_argsare the additional kwargs which would be passed to thecallbackalong with the taskcontext.
default_args / defaults¶
default_args is a standard airflow.models.DAG __init__
arg which specifies the default args of a airflow.models.BaseOperator.
These args would be supplied to all DAG’s operators and sensors.
The defaults dict is a Declarative’s extension which allows to specify
the args more granularly: only to sensors or only to operators
(note that defaults specified in operators would not be applied
to sensors).
FLOW¶
The FLOW atom defines the DAG links between the operators.
FLOW is a dict of lists, where a key is a downstream operator name,
and a value is a list of upstream operators.
Consider the following flow:
my_sensor:
- my_task_1
- my_task_2
my_task_1:
- my_task_3
Assuming that the Airflow operators are assigned to variables, the Python equivalent would be:
my_sensor.set_upstream(my_task_1)
my_sensor.set_upstream(my_task_2)
my_task_1.set_upstream(my_task_3)
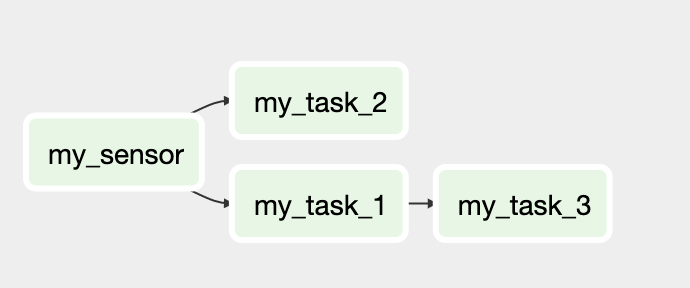
This would be rendered in the Airflow web-interface like this:
Tree view:
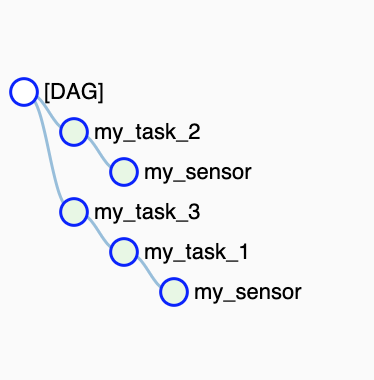
Graph view:
DO (with_items)¶
The do block allows to make the DAG schema dynamic.
A do value is a list of dicts, each dict (a DO_TEMPLATE) must
contain a with_items key and might optionally contain operators,
sensors and flow – these have the same schema as the corresponding
keys of the DAG.
with_items defines a list of items, which should be used to render
a single DO_TEMPLATE block. Operators, Sensors and Flow within the block
would be merged together (as dict unions).
There’re 3 different ways to define with_items:
As a static list of items:
with_items: - some_name: John - some_name: Jill
As a Python callback, which returns a list of items:
with_items: using: myproject.mymodule:my_with_items
Where
my_with_itemsis a Python function which might look like this:def my_with_items(): return [ {"some_name": "John"}, {"some_name": "Jill"}, ]
As an external program, which prints to stdout a list of items in JSON:
with_items: from_stdout: my_command --my-arg 42
Where
my_commandis an executable in$PATH, which might look like this:#!/usr/bin/env ruby require 'json' print [ {some_name: "John"}, {some_name: "Jill"}, ].to_json
operators, sensors and flow within the DO_TEMPLATE block
should use Jinja2 templates to render the items.
The following DAG defined by a do block:
operators:
my_operator:
callback: myproject.mymodule:my_operator_callback
do:
- operators:
my_crops_{{ item.name }}:
callback: myproject.myfruits:my_crops
callback_args:
fruit: '{{ item.fruit_props }}'
flow:
my_operator:
- my_crops_{{ item.name }}
with_items:
- name: pineapple
fruit_props:
shape: ellipsoid
color: brown
- name: watermelon
fruit_props:
shape: round
color: green
… is equivalent to the following DAG defined statically:
operators:
my_operator:
callback: myproject.mymodule:my_operator_callback
my_crops_pineapple:
callback: myproject.myfruits:my_crops
callback_args:
fruit:
shape: ellipsoid
color: brown
my_crops_watermelon:
callback: myproject.myfruits:my_crops
callback_args:
fruit:
shape: round
color: green
flow:
my_operator:
- my_crops_pineapple
- my_crops_watermelon